WebControl
The official tool for Maslow CNC; control your Maslow with any web browser.
- Browser-based, multi-platform controller software.
- Connects to Maslow’s Arduino Mega (or similar) via USB.
- Includes setup instructions (updated from Maslow Community Garden).
- Runs gcode (
.ncfiles) for printing cuts.
You can report issues to the volunteer team.
Context
WebControl started as a browser-based port of the original GroundControl application, but has grown to support more features:
- The calibration and setup process is better documented and easier to use.
- It implements a flask+socketio web server, so other computers on the network may control the machine.
- It can be run on a low-cost device, like a Raspberry Pi.
- It can also support multiple custom firmwares developed by the community which enhance the Maslow.
At this point, WebControl has become the de-facto beginner’s tool for Maslow.
Installation
Pre-Built Raspberry Pi Image
See the dedicated repository.
Pre-Built Application Binaries
There are both single-file (installer) and single-directory (zipped) releases available. The installer files are appropriate for faster machines, like a Windows 10 laptop where an installer executable is desired. Zipped, “single-directory” releases will unpack faster and startup quicker on devices like the Raspberry Pi.
See the releases page and choose the appropriate architecture and release type.
Linux Autostart (systemd)
To run WebControl automatically on startup for a Linux-based machine, it is recommended to create a service:
nano webcontrol.service
type the following:
[Unit]</br> Description=WebControl</br> After=network.target</br> </br> [Service]</br> ExecStart=/home/pi/webcontrol/webcontrol</br> WorkingDirectory=/home/pi/webcontrol</br> StandardOutput=inherit</br> StandardError=inherit</br> Restart=always</br> User=pi</br> </br> [Install]</br> WantedBy=multi-user.target</br>
Save file using Ctrl-X/Yes
sudo cp webcontrol.service /etc/systemd/system
Test with the following:
sudo systemctl start webcontrol.service
Try to reach webcontrol using your browser.
To debug, try:
sudo systemctl status webcontrol
Or, to. get logs:
journalctl -xe
When it works, then type:
sudo systemctl enable webcontrol.service
see for more details: https://www.raspberrypi.org/documentation/linux/usage/systemd.md
Docker & Kubernetes
- Pull the docker image from
inzania/web-controlusing thearmv7oramd64tag. - Mount a data/config volume at
/root/.WebControl - Expose port
5000 - Run with
privileged: truesecurity context for USB access.
Remote Access
WebControl can be run behind a front-proxy with TLS termination, such as nginx. You can use this in conjunction with semi-static IP to access your Maslow from anywhere with internet access. The full scope of this is outside this documentation, so you should be sure you understand the security implications before proceeding (hint: WebControl doesn’t have a login or user authentication system).
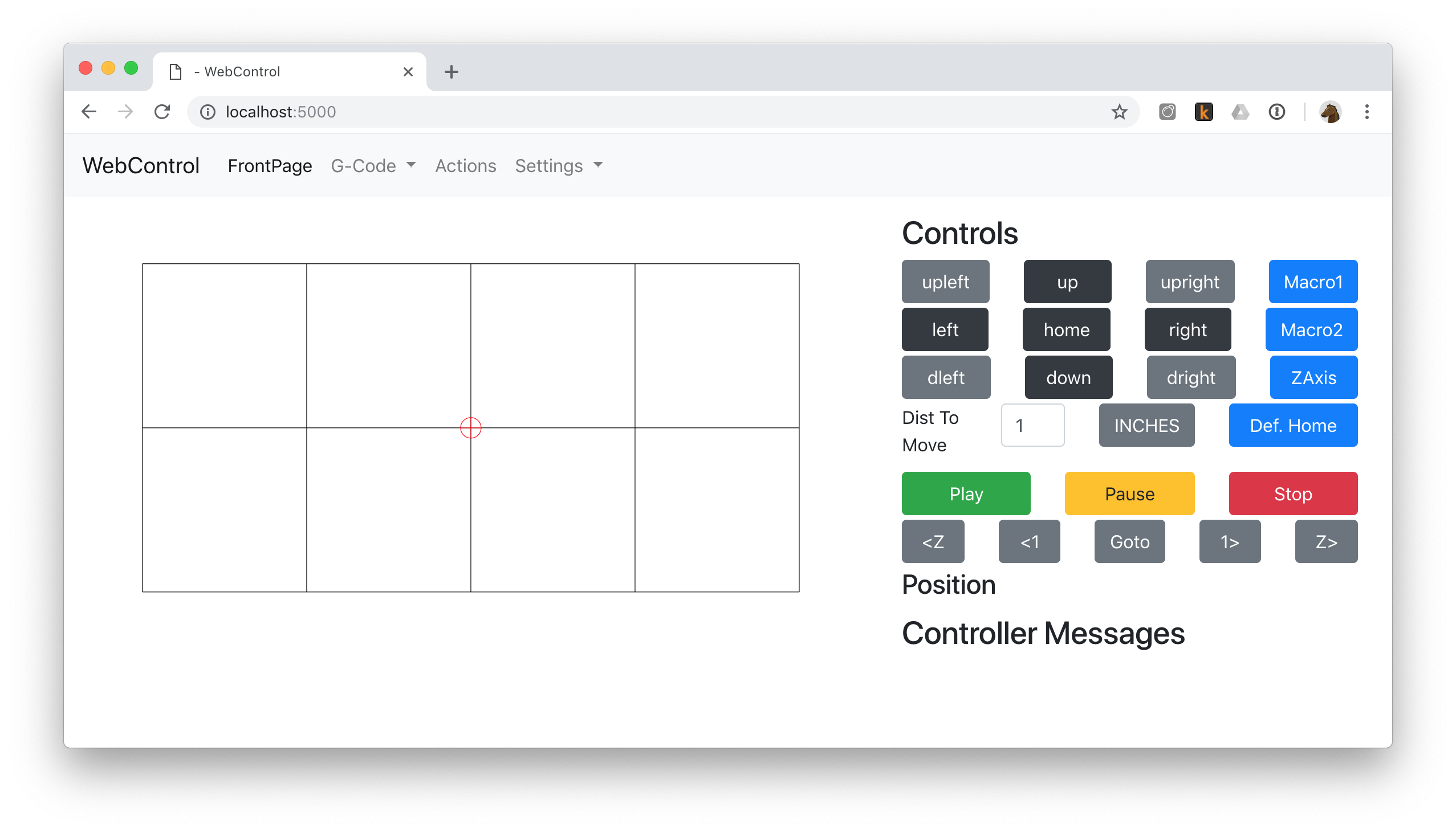
Usage
Open your web browser to localhost:5000 (or use the IP address of your device).
Built With
- Flask - The web framework used
- Flask-Socketio - Websocket integration for communications with browser clients
- Bootstrap4 - Front-end component library
- Jinja2 - Template engine for web page generation
- Feather.js - Only icon library I could find that had diagonal arrows.. works well to boot.
- OpenCV - Library for computer vision to implement optical calibration
- Numpy - Library for math routines used with optical calibration
- Scipy - Another library for math routines used with optical calibration
- Imutils - Adrian Rosebrock’s library used with optical calibration
- Schedule - Library used to schedule checking connection with arduino
- Ground Control - Much of this was adapted from the Kivy-based Ground Control
Developing
Virtualenv
You can use virtualenv to set up a local development environment for running the code without installing packages in the system Python installation.
# Create a virtual environment
virtualenv -p python3 .venv
# Activate the virtual environment
source .venv/bin/activate
# Install the prerequisites
pip install -r requirements.txt
When running on the Pi, you’ll also need some extra dependencies and will need to build OpenCV from source. See the Dockerfile for details. (TODO: add instructions here)
Then you can run the code with.
python main.py
The server will then be available at http://localhost:5000
Automatic code formatting
This project uses black to automatically format python code. To run the autoformatter, simply install black locally with pip.
pip install black
Subsequently, you can just run black . to format all files in the current directory.
black .
If you don’t have python3.6+ locally (to be able to run black), you can run black in a Docker container.
docker run -v $(pwd):/code johnboiles/python-black .
IDE
Pycharm Community Edition is a free, well-featured Python IDE.
With the File Watchers and BlackPycharm plugins you can set up your editor to automatically format your code on save. Then you never have to think about code formatting again :tada:
Contributing
Please read CONTRIBUTING.md for details on our code of conduct, and the process for submitting pull requests to us.
Versioning
Added to TODO list?
With Thanks
- Madgrizzle - Initial work - madgrizzle
- John Boiles - Docker Expert - johnboiles
- Tinker - UI Improvements/Bug Fixer/Etc. - gb0101010101
See also the list of contributors who participated in this project.
License
See LICENSE